|
|


 |
各スイッチ類とMACHの関係です
MPGはMPG1入力
他のインプットは
MACHの入力設定→ペンダント機能(スイッチの説明)
Input#1→Reset(赤スイッチ)
Input#2→Hold(黄スイッチ)
Input#3→Run(青スイッチ)
ここからロータリースイッチ①軸選択
OEM trig#1→JogCont(SW1-1)
OEM trig#2→MPGMode_X(SW1-2)
OEM trig#3→MPGMode_Y(SW1-3)
OEM trig#4→MPGMode_Z(SW1-4)
OEM trig#5→MPGMode_A(SW1-5)
ここからロータリースイッチ②倍率選択
OEM trig#6→SelectMPGincr1(SW2-1)
OEM trig#7→SelectMPGincr2(SW2-2)
OEM trig#8→SelectMPGincr2(SW2-2)
左の写真はPoKey55Tを接続していますが、
SSで接続されでもこのBrainは使用できます。
注意
Config→SystemHotkeysの
External Buttoms-OEM Codeはすべて-1にしてください。
|
|
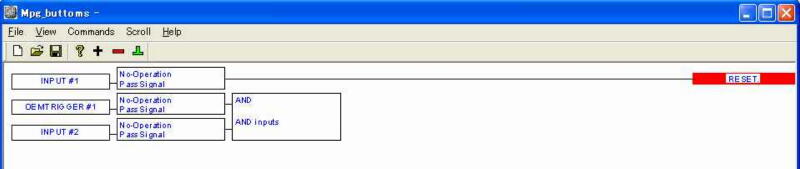
Inputスイッチ用Brain
今回はスイッチもありますので少しややこしいです。
BrainEditorを開いてMPG用とわかり易い名前をつけます。
Mpg_buttonsとしました。
Resetを優先させたいのでInput#1(Reset)の命令から作成します。 |
 |
Input#1(Reset)はどのモードでもResetを割あてますので簡単です。
「簡単なBrainを作ってみる」の復習になります
[Input#1の入力]→[シグナルをパス]->[Resetボタンを押す]。
出来ましたら次のステップです。 |
 |
Input#2(Hold)とInput#3(Run)はロータリ-スイッチ(以下SW1-*)の
位置によって機能を変えますのでSW1の位置を判断させます。
先ずはSW1がJogContにあるはOEM trig#1(SW1-1)に
入力がありますので
[OEM trig#1(SW1-1)入力]→[シグナルをパス]まで作成します。
続けて[Input#2(Hold)入力]→[シグナルをパス]まで作成します。
|
 |
ここでこの二つが同時にあったら何をするの項目を付け加えます。
方法は今作った2つの[シグナルをパス]をクリックします。
二つとも緑色 になります。 になります。
この状態でタスクバーの アイコンをクリックします。 アイコンをクリックします。 |
 |
Dual Input Lobeのダイアログが現れます
ANDにチェックを入れます。
ANDですとこの場合
[OEM trig#1(SW1-1)入力]→[シグナルをパス]が有り
「かつ」
[Input#2(Hold)入力]→[シグナルをパス]があったらとなります。
|
 |
左の様な2つのシグナルを比較処理出来るようになります。
出来た比較処理(Dual Input Lobe)をクリックして
緑色 にし、ツールバーの にし、ツールバーの アイコンをクリックします。 アイコンをクリックします。 |
 |
Add Inputのダイアログが現れますのでButton Press をクリック
プルダウンメニューから1001-FeedHoldを選択、OKをクリック。
これでSW1-1ポジションのとき黄色スイッチを押すと
Holdの命令が出来ました。 |
 |
上記の方法を
入力
Input#2->Input#3
ButtonPress
1001-FeedHold ->1000-CycleStart
に読み替えて命令を作成します。
SW1-1のポジションで青スイッチを押すと
Runの命令が出来ます
黄、青スイッチに他の機能を加えるのでなければ比較処理は
いりませんし
MACH3のConfig→SystemHotkeysでOEMCODEを
割り当てるだけですみますが、複数の機能をロータリースイッチの
位置で割り振りするために比較処理を入れました。
|
 |
後はSW1-1~5、SW2-1~3の命令を作成していきます。
コピペなどは出来ませんので地道にマウスをクリッククリックを繰り返します。
左の画面は少し大きく見れるようになっていますので参考にしてください。
ロータリースイッチですとOEMtrig#3(SW1-3)
以降のPressButton-327-MPG Jog Onの命令は不要です。
軸選択にプッシュスイッチ使用を考慮して入れてあります。
使用したOEMコードです。
資料によって呼び名が違いますので注意してください。
1021-Reset
1001-HoldFeed
1000-CycleStart
204-JogModeCont.
327-MPG Jog On
185~8-MPG1JogX~A
265~7-Select MPCIncr.1~3
(GeneralConfig→Jog incr. inCycle Modeで移動量を設定します。)
|

 Brains_for_MPG.zip
Brains_for_MPG.zip